I just came across a couple of very interesting videos on this article on BotJunkies. Both videos display pretty amazing navigation capabilities in robots, and the ability to recognize and avoid the obstacles, even moving ones. Most of the processing equipment for the HRP-2 robot are off board though, which is why I find ASIMO still a lot cooler. 😉
So in case there’s anybody out there who doesn’t already know, in the past week I’ve been busy knitting up a new online tool which I’m calling Verse. It’s a wiki / scrapbook / data collection tool, which in time me and fiends will hopefully fill up with interesting stuff. And if you’re interested in adding content, you can easily sign up and do so.
I’ve tinker with the code quite a bit, and there are tons of capabilities that may not be very obvious right now due to the fact that there’s not enough content to display everything, but I have added some information to the help page. Both HTML and wiki syntax are allowed in every page. If you’d like to know how a certain something is done, you can just check out the source code of the page that contains the element you’re looking for.
So on my quest to learn some more D, I tired a few different IDEs and so far I like Poseidon best. It’s very nice and comfy to use open source IDE written with DWT. The only thing about it that gave me some trouble to start with, was that even though I had introduced the correct path to DMD and DMC, I would still get an “Wrong DMD path” as soon as I tried to compile some code. After a bunch of playing around and trying different things, I did find the solution, but I can’t say that I actually understand the “why” of it. Basically all I had to do was to not include the “bin” folder in the path. And that was that, problems solved!
I also found this little debugger called Ddbg that works nicely with Poseidon. And out of pure curiosity, I also got me this ebook. Will start reading through it soon enough.
Well well, it appears Honda’s ASIMO has a serious competitor! While ASIMO’s fastest running speed has been 6km/h so far, this new Toyota humanoid is running at 7km/h. Also as seen in this video, this robot can do a nice job re-balancing itself when pushed slightly. This new Toyota robot’s stunningly natural running really amazes me. however, while standing, the legs look all things but natural. 😉 Which is why I still like ASIMO better. =)
This article on IEEE spectrum is pretty awesome… check it out!
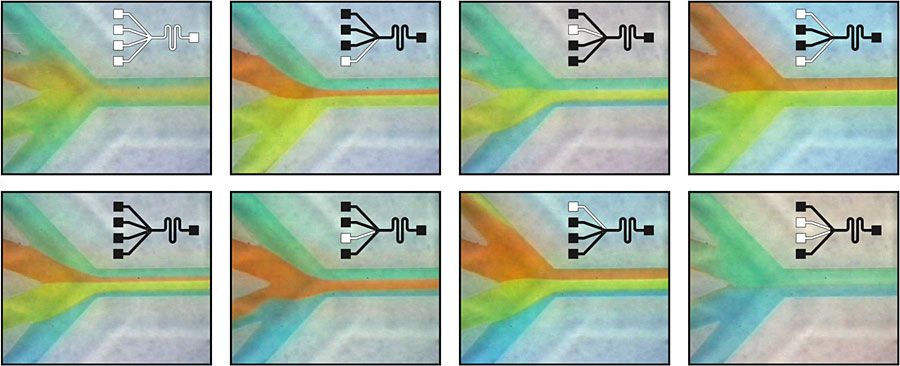
“Researchers at the University of Michigan have found a way to control the movement of tiny droplets of fluid in a microelectromechanical (MEMS) device—with sound. The scientists use several musical tones to move droplets along different channels on a chip. By combining tones or applying them at appropriate times, they can move liquids along multiple channels and even mix, split, and sort the liquids.
The advance, published this week in Proceedings of the National Academy of Sciences, holds promise for making microfluidic devices compact and simple. Microfluidic devices are glass or plastic chips with etched channels through which you can maneuver nano- or even picoliters of liquids. Thousands of chemical or biological reactions can be performed on the chips simultaneously, promising to speed up medical diagnostics, chemical synthesis, and drug discovery.”
An article I just came across on ReadWriteWeb… very very interesting!
“The proliferation of real-time search engines and trend monitors (sometimes referred to as “listening platforms”) has thus far done little to address problems of this scale and importance. This is because they fail to provide context — i.e. show how a new piece of information is relevant to what we’ve seen before and where it fits in the space of possibilities and relationships. For instance, if you are a programming director at CNN trying to discriminate between significant news and Internet memes, simply knowing that #iranelection is a trending topic doesn’t tell you its relation to other topics or which communities are driving it — both critical factors. One promising area is data-oriented user interfaces: data and algorithmic analysis in the back-end and direct visualization and navigation in the front-end. This the next stage of social information, slicing and dicing, mixing and matching, interpreting and analyzing, completely on demand. In this new landscape, the data is the interface. It’s not just about sitting back and looking at pretty pictures. It is about setting aside stale UI metaphors and getting as bare-to-the-bone a human interface as possible for computation. The recently launched Wolfram-Alpha applies this principle to structured data. (Disclosure: I was a member of the core Wolfram-Alpha team and may continue to consult with Wolfram Research.) Real-time data streaming offers similar possibilities and opportunities. In this vein, let’s outline some basic ideas and methods for giving context to the streams.”
“We have put together a video of our Milestone 2 run, which we completed this past Monday, June 1, 2009. This particular run had our PR2 alpha robot navigate through eight doors, and plug its power cord into nine outlets. In this video, you can see the various challenges our robot faced, such as a crowded office environment and the abrupt appearance of a human obstacle. We nearly sabotaged the run early on. Folks around the office were eager to track the progress of the robot, so many people ran their own monitoring programs on the PR2. This caused an increase in CPU load, starving the navigation software. Nonetheless, the robot was able to continue with the run, albeit more slowly and cautiously.”
“We are currently developing algorithms that will narrow the learning gap between humans and machines, and enable flight systems to ‘learn’ the way humans do: through practice.
Rather than being programmed with detailed instructions, these flight systems will learn from experience. Like baby birds leaving the nest, they will be clumsy at first. Over time, however, they will become capable of sophisticated, coordinated maneuvers……”
Hey, I'm Aasemoon, and this is my blog which has been around since 1998. Childhood toy project that ended up growing up with me.
You can reach me here:
aasemoon.blue
Zorbas is my kitten. You can see some pictures of him below. =)
Zorbas
Search
Spotify
GDPR
Regarding this: EUGDPR.org
I comply. ;)
Oh and there's cookies here. Yummy ones.
Cheers!